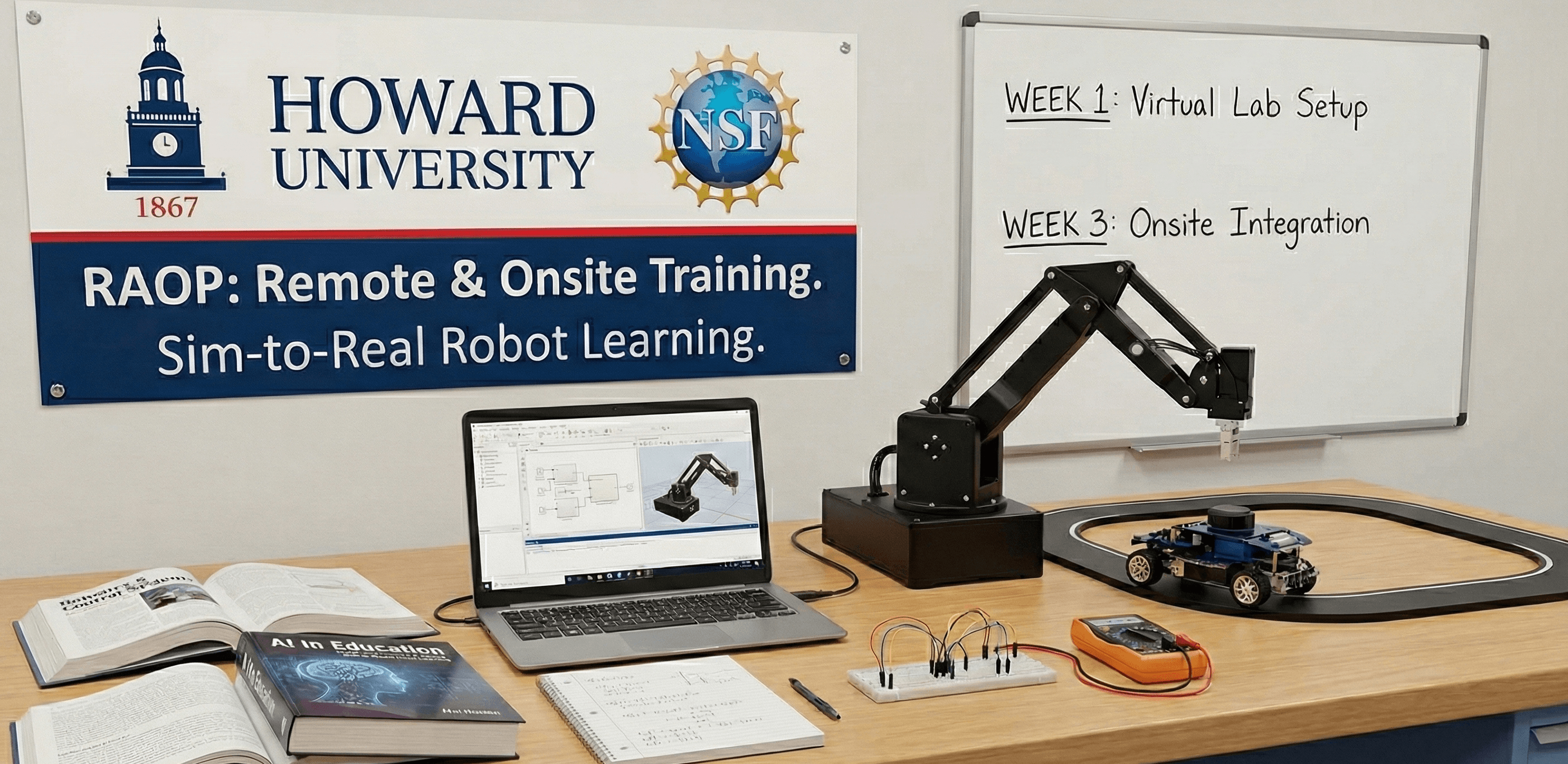
Robotics & Automation Outreach Program (RAOP)
An NSF-funded summer research and professional development program hosted by the AVRC Laboratory at Howard University. Designed for pre-service and in-service STEM educators through a structured 2-week virtual + 1-week on-site experience in robotics, autonomy, and control.
Applications open Jan 15, 2026 · Priority deadline Feb 15, 2026
AVRC Resource Navigator
Quickly find lab materials across RAOP, Senior Design, VIP projects, and course labs by category, equipment, mode (virtual vs. physical hardware), software, and file type.
Autonomous Vehicle Robotics & Control
From digital twins to real-world deployment: resilient autonomy for air and ground systems.



Our Mission
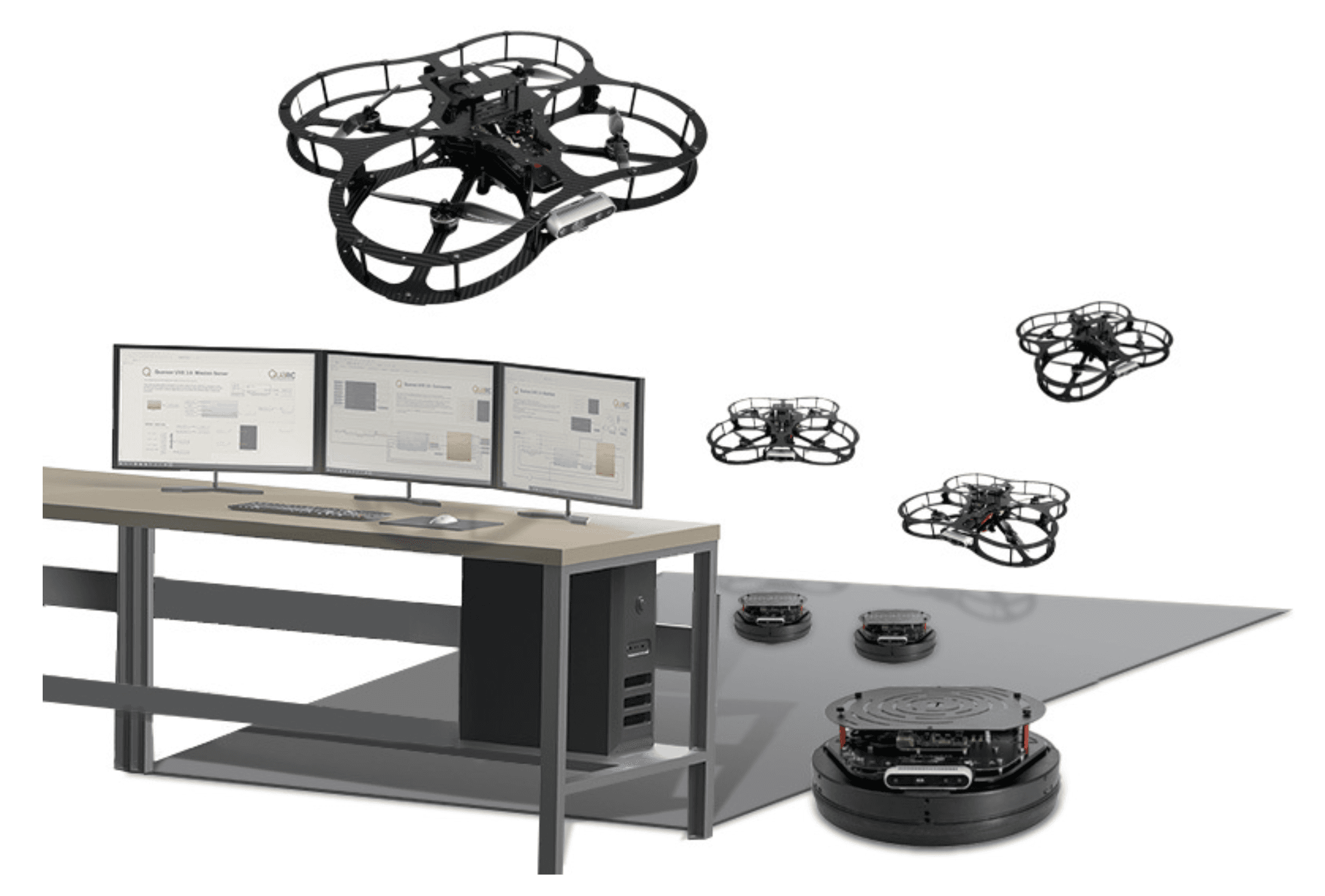
The Autonomous Vehicle, Robotics, and Control (AVRC) Lab at Howard University advances resilient autonomy and distributed control for mixed UAV and UGV teams. By integrating simulation-to-deployment workflows using QLabs Digital Twins and a DoD-funded Autonomous Vehicles Research Studio, the lab accelerates innovation in multi-agent coordination, perception, and assured autonomy for real-world applications.
- DoD-funded Autonomous Vehicles Research Studio (QAVRS) featuring QDrone 2, QBot, high-precision localization, and centralized ground control.
- Comprehensive Quanser ecosystem for autonomy, robotics, and control education: QDrone 2, QBot, QArm, Qube-Servo 3, Aero 2, and HD2 Haptic systems.
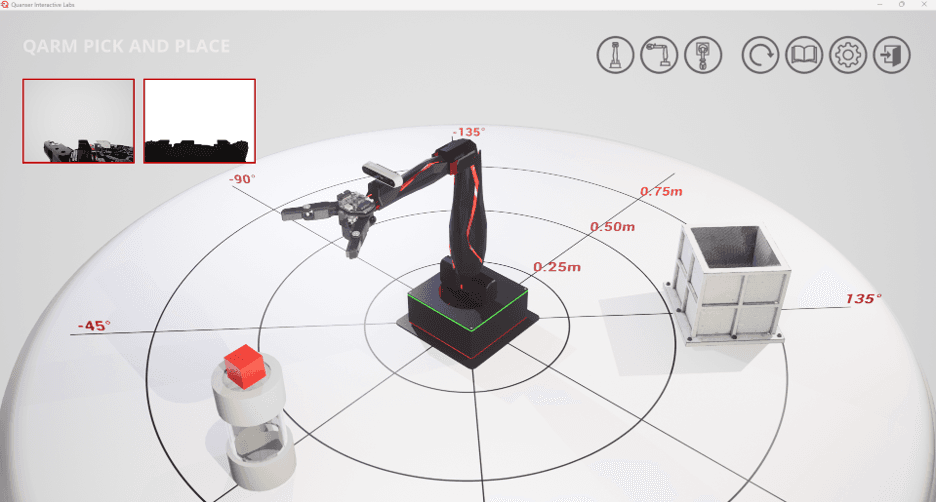
- Digital-twin integration (QLabs) enabling rapid prototyping and classroom-to-lab transitions for both research and teaching.
- Undergraduate and graduate engagement through training, senior design projects, and the NSF Noyce RESS Robotics and Automation Outreach Program (RAOP).
Labs & Facilities
Indoor autonomy for aerial and ground platforms with motion capture and high-precision localization.
Manipulation, haptics, and HRI; from QArm to HD2 haptic device.
Modern control education with Qube-Servo 3, Aero 2, and classic servo experiments.